ROSOrin - Multimodal ROS Robot Development Platform
ROSOrin is an integrated ROS development platform, featuring hub-integrated wheel drive. It offers versatile application solutions for various scenarios, practical training, and ROS learning tutorials, making it ideal for robotics education, functional development, and product innovation.
The chassis design integrates three motion modes, enabling flexible switching between different modes. Additionally, it boasts high-performance hardware configurations to support the learning and validation of composite robotics.
Multimodal Composite Robot
ROSOrin is equipped with a wide range of high-performance configurations, providing powerful computing ability and stability. Additionally, it supports various motion chassis.

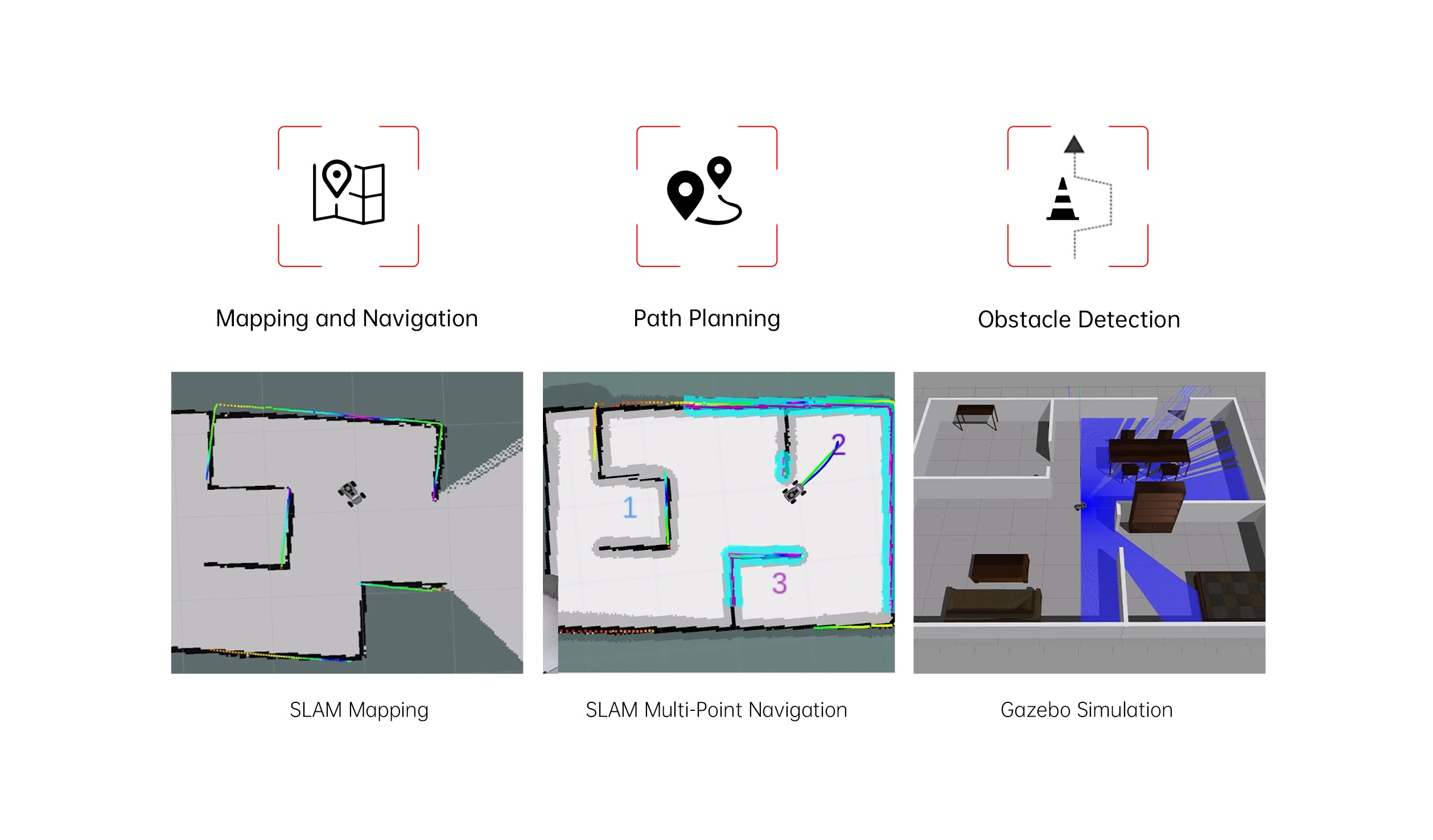 |
Mapping Navigation, Path Planning
ROSOrin is capable of autonomously perceiving its environment, determining its location, and planning paths. Additionally, it can achieve high-accuracy mapping, multi-point navigation, and obstacle avoidance.
|
3D Vision, Target Tracking
By utilizing the RTAB SLAM algorithm and integrating vision and LiDAR data, ROSLander can navigate and avoid obstacles in 3D maps.With depth map data collected by the 3D depth camera, users can create and deploy simulation environments for tasks such as target tracking, and bridge crossing.
|

|
 |
Deep Learning, Practical Training
Establish a multi-scene training and testing platform to accommodate small-space venues. To cater to beginners' needs, it can be programmed to include functions such as autonomous driving, SLAM mapping, autonomous navigation, obstacle avoidance, autonomous reverse parking, and traffic light recognition.
|
Compatible with ROS1/ ROS2
The programs and source codes of ROSOrin are open-source and compatible with both ROS1 and ROS2. WonderNEX produces course materials such as ROS, robot hardware structure, and simulation teaching to provide users with a comprehensive deep learning platform.
|
 |
| Overall specification |
Size |
275*211*165mm |
| Weight |
2.64kg |
| Chassis type |
Mecanum-wheel, Ackermann & differential chassis |
| Material |
6061 hard aluminium alloy |
| Control system |
Jetson Nano B01 controller + STM32 robot car controller |
| Control method |
iOS/ Android APP, wireless handle, model aircraft remote controller |
| Operating system |
Ubuntu 18.04 LTS + ROS Melodic |
| Programming language |
Python/C/C++/JavaScript |
| Camera |
Angstrong HP60C 3D depth camera |
| Lidar |
SLAMTEC S2L Lidar |
| Chassis |
Suspension structure |
Rear-wheel swing-arm design |
| Tyre |
100mm Mecanum-wheel/ 80mm labyrinth-pattern wheel |
| Motor |
Hall encoder DC gear motor |
| Motor speed ratio |
1:90 |
| Power supply |
Battery capacity |
11.1V 6000mAh LiPo battery |
| Plug |
DC5.5*2.5 Female/ SM-2P Male |


